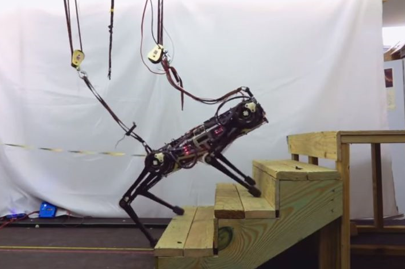
Recentemente os pesquisadores do MIT desenvolveram um sistema de controle que melhora a velocidade e agilidade de robôs com pernas à medida que saltam através de lacunas no terreno. O novo sistema de controle é dividido em duas partes – uma que processa a entrada em tempo real de uma câmera de vídeo montada na frente do robô e outra que traduz essas informações em instruções sobre como ele deve mover seu corpo. Ele foi testado no Mini Cheetah, que é uma versão mais compacta e ágil.
Ao contrário de outros métodos para controlar um robô de quatro patas, este sistema de duas partes não exige que o terreno seja mapeado com antecedência, para que o robô possa ir a qualquer lugar. No futuro, isso pode permitir que robôs partam para a floresta em uma missão de resposta a emergências ou subam um lance de escadas para entregar medicamentos a um idoso recluso.
O uso de dois controladores separados trabalhando juntos torna este sistema especialmente inovador. Um controlador é um algoritmo que converterá o estado do robô em um conjunto de ações a serem seguidas. Muitos controladores cegos (aqueles que não incorporam visão) são robustos e eficazes, mas apenas permitem que os robôs andem em terreno contínuo.
A visão é uma entrada sensorial tão complexa para processar que esses algoritmos são incapazes de lidar com isso de forma eficiente. Os sistemas que incorporam a visão geralmente contam com um “mapa de altura” do terreno, que deve ser pré-construído ou gerado em tempo real, um processo que normalmente é lento e propenso a falhas se o mapa de altura estiver incorreto.